




仙台高専向けデジタルツイン (ロボット) 納入実績
製造ラインを意識した次世代型・簡易教育システム提案

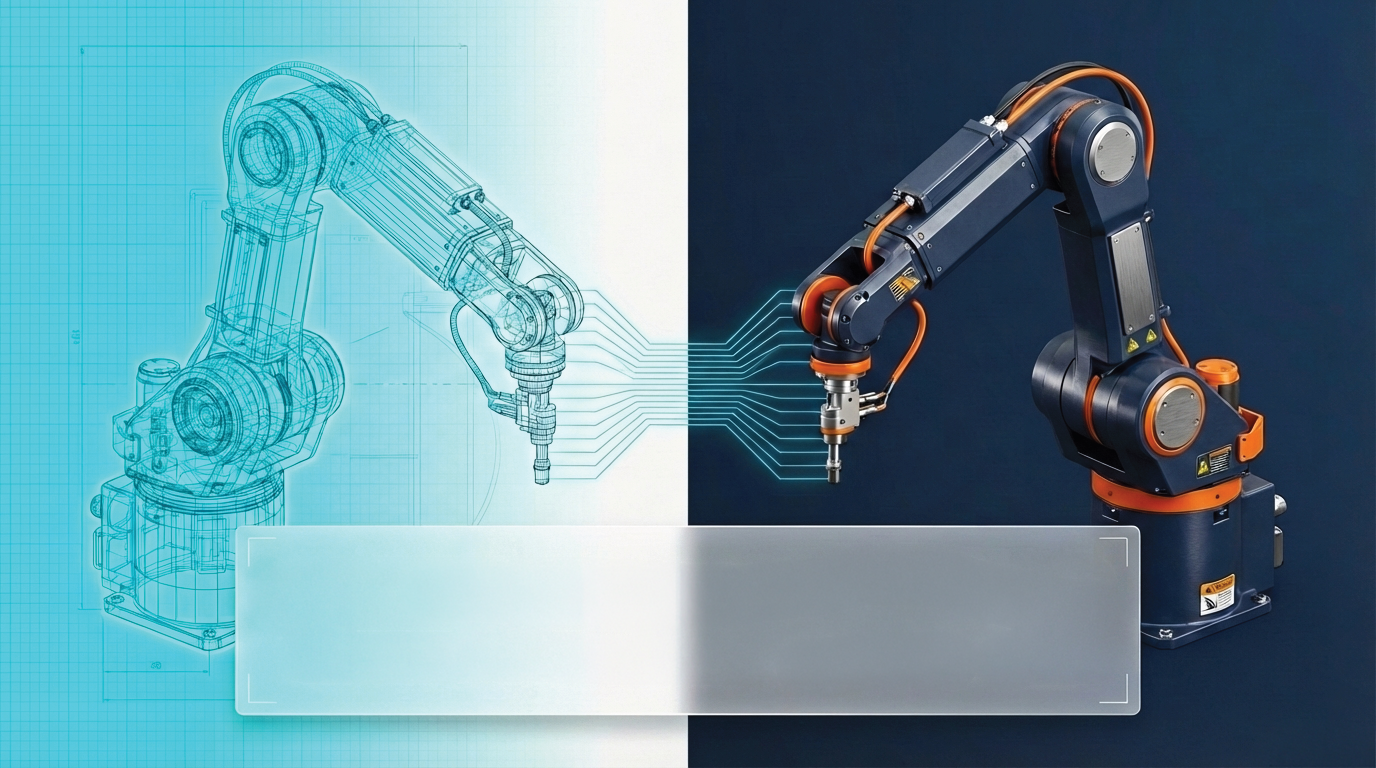
背景と目的: 次世代エンジニアに求められるスキル
仮想空間
(シミュレーション)
現実空間
(製造ライン)
製造現場のシフト
従来の単なる「軸制御」から、複雑で実践的な「スカラ制御 (SCARA)」を用いた製造ラインへと移行中。
求められるエンジニア像
現実空間と仮想空間(シミュレーション)を差別化せず、両空間をシームレスに(意識せずに)往来・操作できる人材。
本提案の目的
オフラインティーチングから実機動作の即時検証までを網羅する、スカラーロボットとシミュレータを融合した次世代学習環境の構築。

システム全体像:環境を意識させない単一の学習空間
仮想空間
スケールロボットシミュレーションシステム
PC 上のアプリケーション内におけるシミュレーション環境
現実空間
スケールロボットシステム
実機による精緻な
ロボット制御環境
運用基盤
インストール・教育マニュアル
導入から操作、他高専への展開を見据えた
包括的なトレーニングマニュアル一式
「これらは独立したシステムではなく、環境を意識させない
単一のシームレスな学習環境として機能します。」
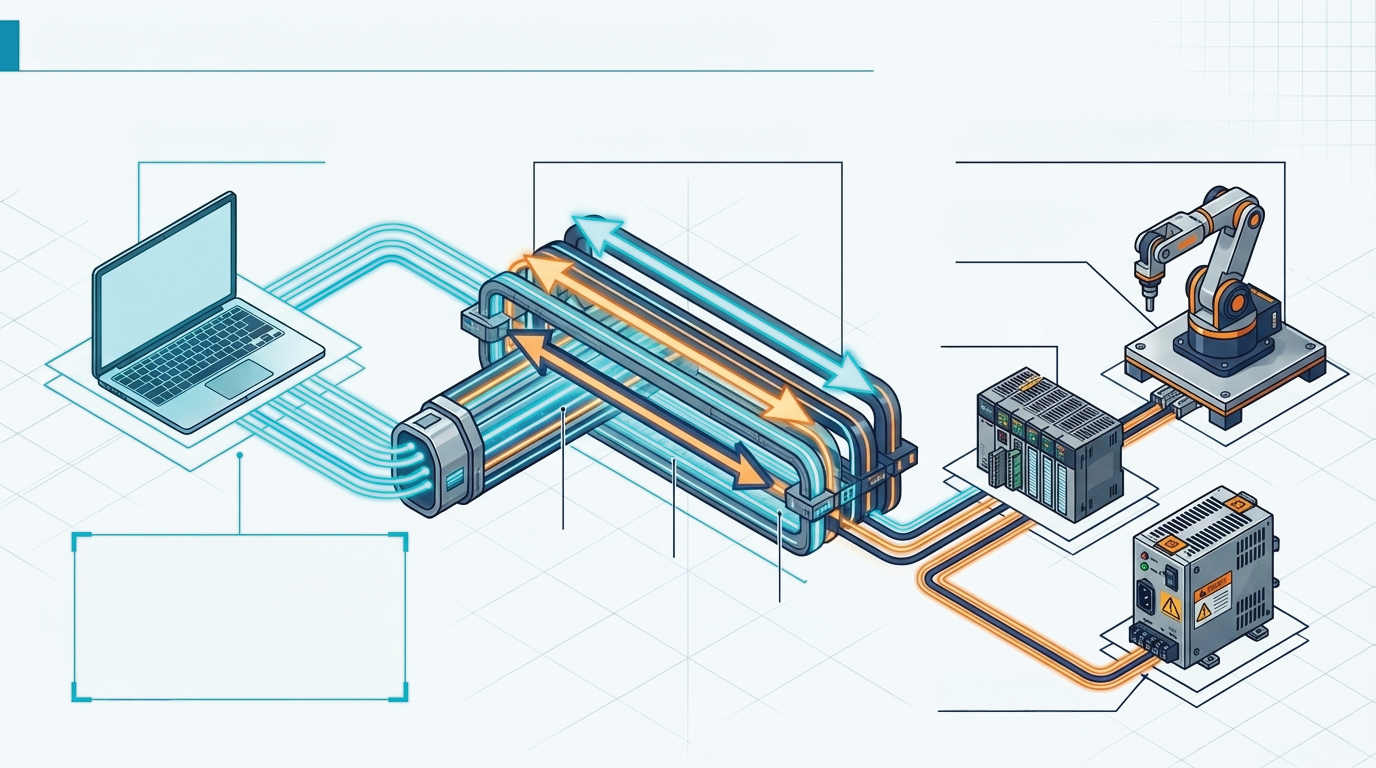
システム構成図:デジタルツイン・トポロジー
教材用パソコン
双方向データ通信
スケールロボットシステム
ロボット本体
(SCARA)
制御用PLC
電源ユニット
Ethernet
USB
シリアル通信
・Windows 11 Pro
・Core i3以上
・メモリ 4GB以上
・SSD 500GB以上
・スケールロボットシミュレータ搭載
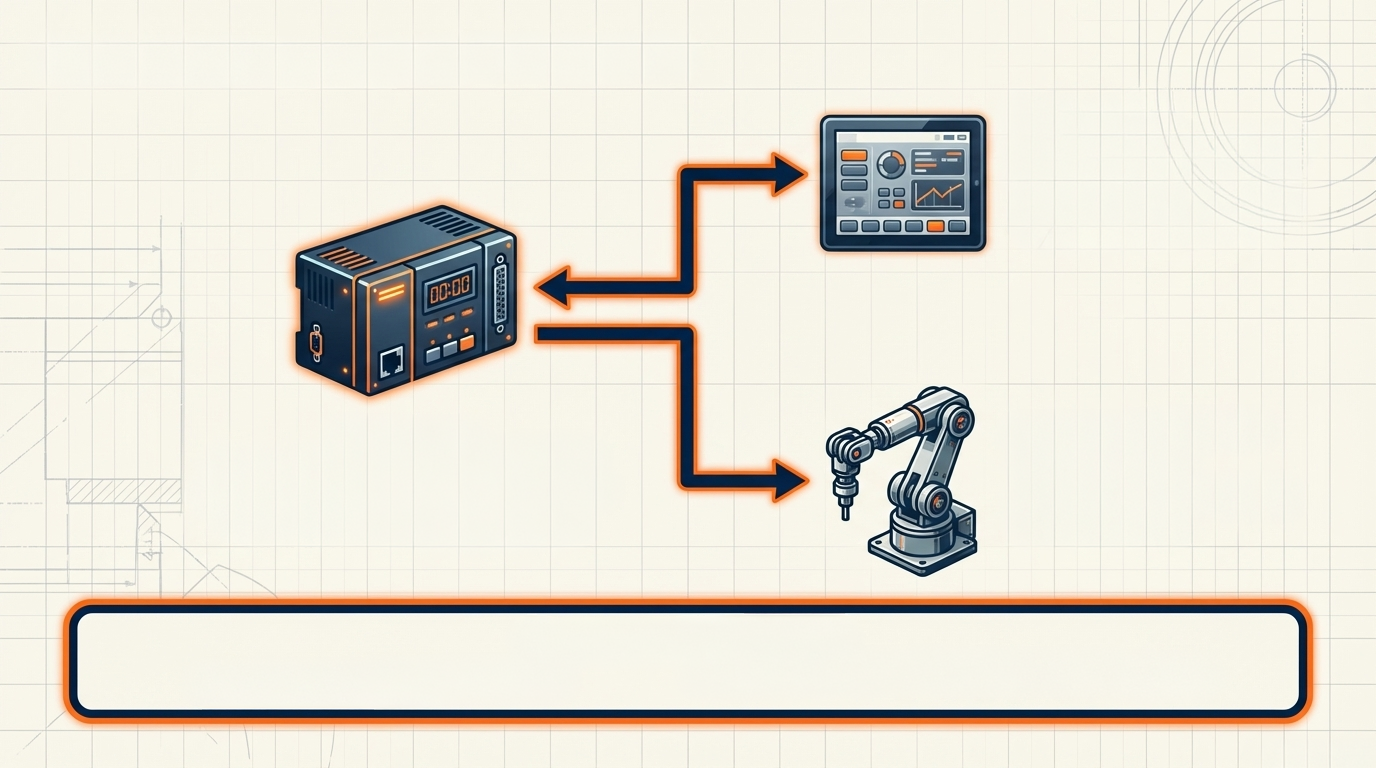
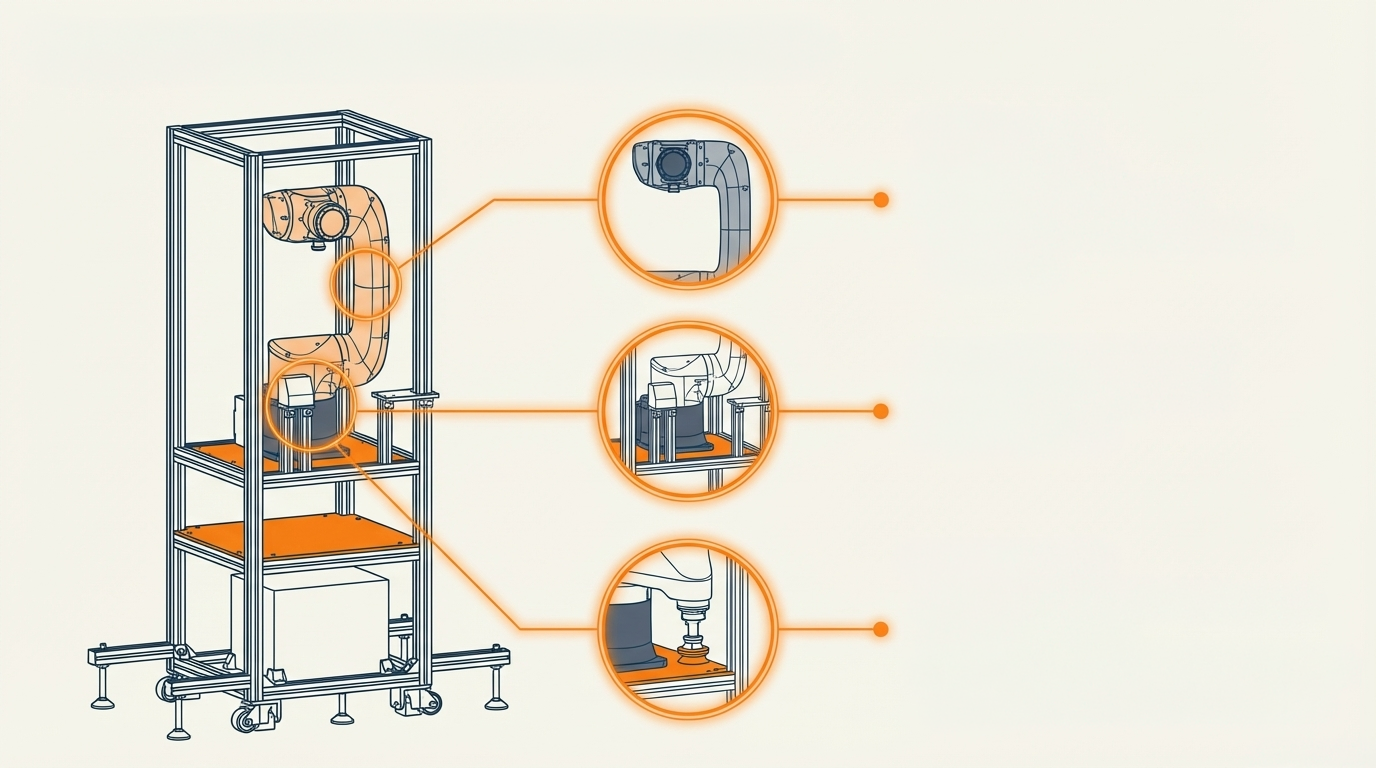
構成詳細:ハードウェア連携イメージ
三菱製 GOT
(Graphic Operation Terminal)
PLCと接続され、直感的なHMI(ヒューマンマシンインターフェース)操作と状態監視を提供。
三菱製 PLC
(Programmable Logic Controller)
システムの頭脳。ラダー/SFCプログラムの実行基盤。電源ユニットと共に別空間に収納。
水平多関節ロボット
(SCARA Robot)
PLCからの指令に基づき高精度な物理駆動を実行。
ハードウェア制約・スペック
システム全体電源容量:2kW以下 フットプリント:1000×1000×1700mm以内
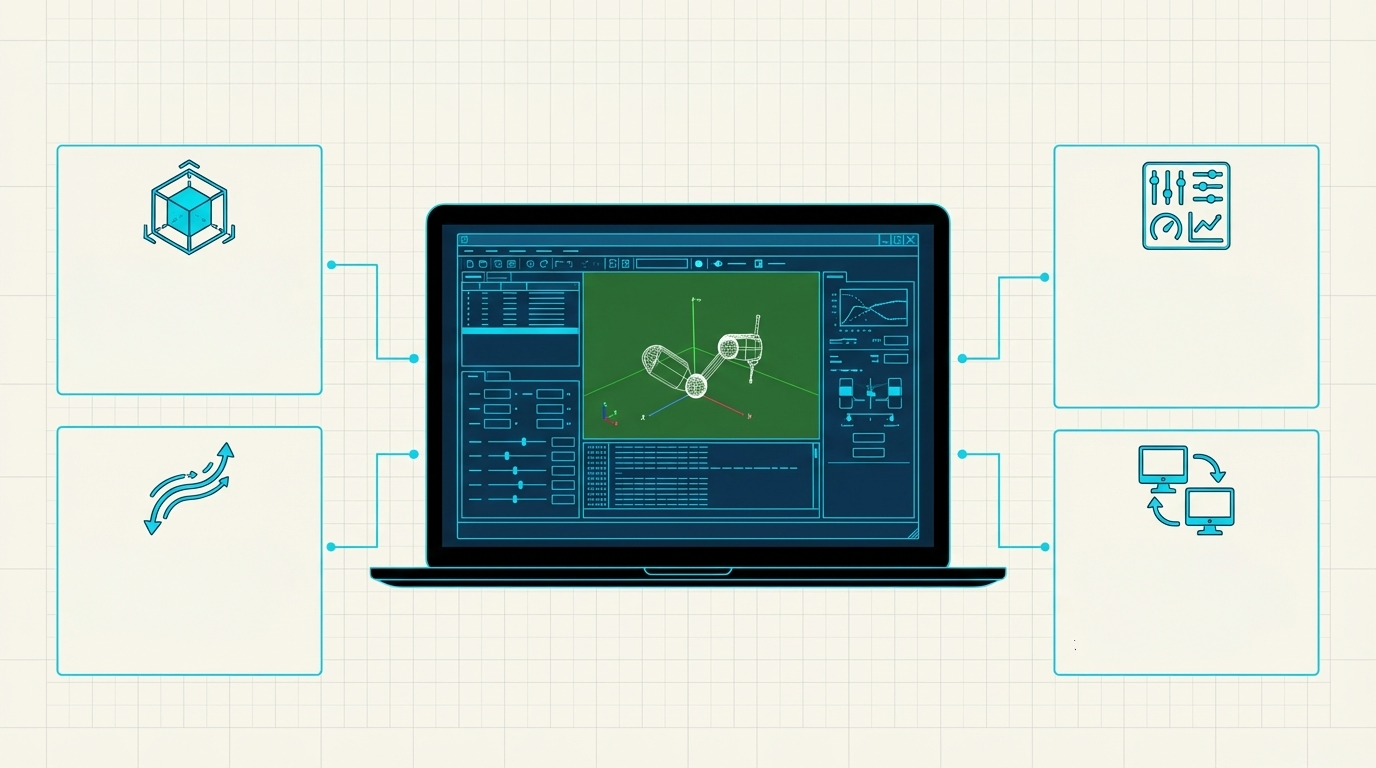
仮想空間:シミュレーションシステムの機能
3D可視化と環境構築
スケールロボットと動作環境を3D表示し、現実と同じ実験環境を仮想内に再現。
軌跡可視化とデータ出力
動作軌跡のビジュアル化と3D座標データの出力。
パラメータ&
オートチューニング
ターゲットマシンの各種パラメータ設定と、最適値のオートチューニング機能。
ダイレクト通信
制御用PLCとの直接通信によるオンライン/オフラインシミュレーション。
現実空間:スケールロボットシステムの実装
基本スペック
– 可搬重量: 3kg以上
– サイクルタイム: 0.44s以下
– 位置繰り返し精度: ±0.01mm以内
(X-Y合成)
可動範囲 (Workspace)
– 水平: X=100mm, Y=450mm
– 高さ: Z=100mm
ツール&タスク
– エンドエフェクター: 吸着パッド方式
(コンプレッサ搭載)
– 実習タスク: 3種類の受け治具間での円筒
形ワーク (φ35~45mm樹脂製) 搬送

教育現場に最適化された安全性とモビリティ
安全性 (Safety First)
透明樹脂カバーによる保護スケール
扉開閉時のシステム電源自動遮断機能
緊急停止(非常停止) ボタンの標準装備
漏電時の自動停止機能
モビリティ (Mobility)
分割式構造(ロボット部とコントローラ部の分離運搬が可能)
ロック機構付きキャスターによる容易な移動
標準的なAC100Vコンセント駆動
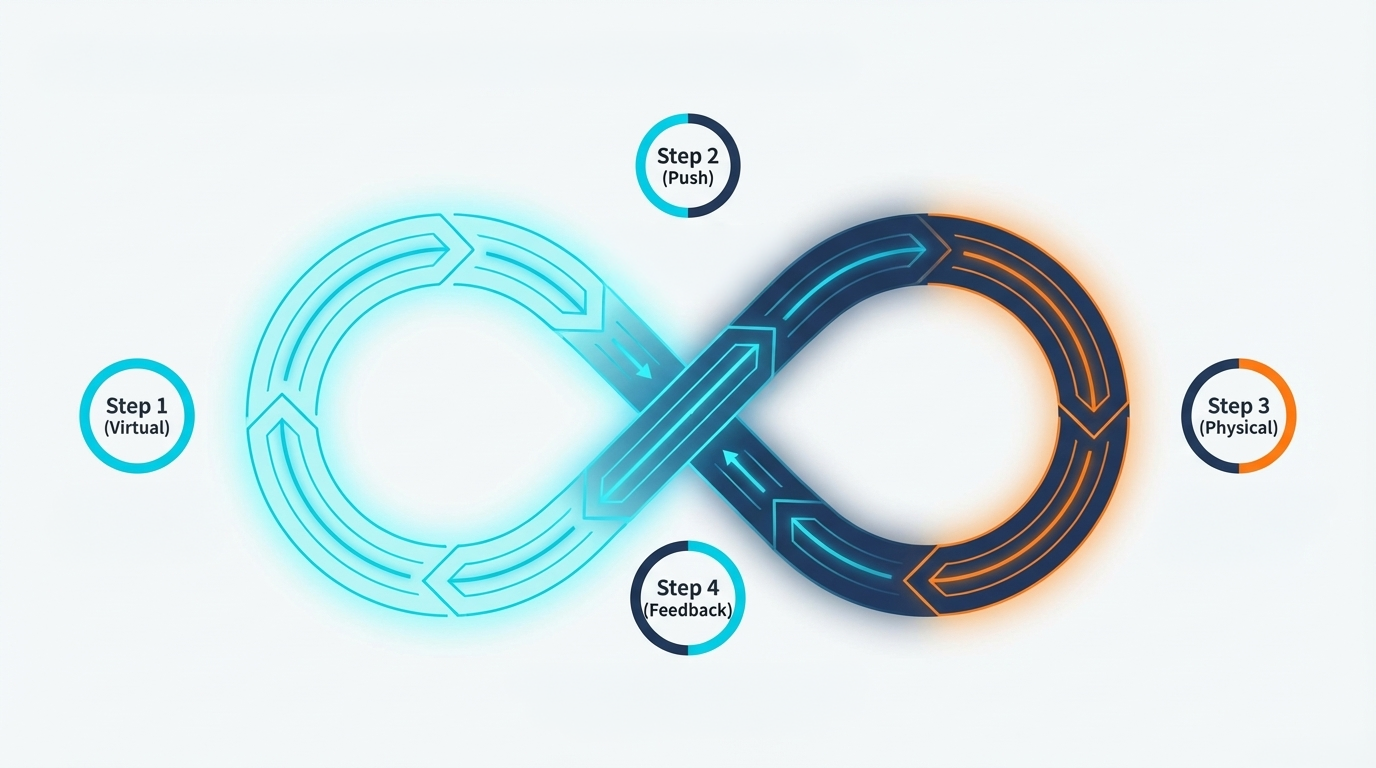
デジタルツイン・ループ:双方向のデータ連携
3D CADデータのインポートとオフラインティーチング。
プログラム・座標データを実機の三菱製PLC/GOTへ転送。
スカラーロボットによる高精度な物理タスクの実行。
現実空間での稼働情報・センサーデータを取得し、仮想空間のシミュレータへフィードバック・状態表示。
教育的価値と学習ステップ
Step 4:データ連携・最適化
双方のデータを共通利用し、チューニングと最適化問題を解決。
Step 3:オンラインティーチング
実機 (GOT・ティーチングボックス)を用いた現実空間での動作検証。
Step 2:オフラインプログラミング
PC上でのラダー/SFCプログラム作成とシミュレーション。
Step 1:環境モデリング
仮想空間上でのロボット・実習環境の構築。
日本語版トレーニングマニュアル標準提供

導入実績:全国の高専ネットワークへの展開
「全く同じシステム構成での導入・運用実績があり、標準化された高度な教育プラットフォムとして実証済みです。」
Proven
実証済み
Proven
実証済み
1. 仙台高等専門学校広瀬キャンパス
2. 奈良工業高等専門学校
3. 久留米工業高等専門学校
安心の保守・運用支援体制
品質保証 (Warranty)
納入後1年間の無償修理・交換対応(メーカー保証に準ずる延長も対応)。
部品供給 (Parts Availability)
保守部品の最低5年間の保管・供給を保証。
技術サポート (Technical Support)
専門要員による遠隔保守対応に加え、トラブル時の迅速なオンサイト(現地)対応体制。搬入・据付・調整まで全てカバー。

まとめ:次世代エンジニア育成の強固な基盤
真のデジタルツイン
仮想と現実をシームレスに繋ぐ双方向データ通信とシミュレーション環境。
産業標準ハードウェア
三菱製PLC/GOTと高精度スカラーロボットによる、現場(製造ライン)に直結する実践的スキル習得。
実証済みの教育モデル
全国3つの高専で同一構成が稼働中。安全基準とモビリティを満たした完成された教育パッケージ。
")
")
(仙台高専/広瀬C・名取C様)")
")




 納入実績")






