産業用ロボットとは
まずは、ロボットとは何かという定義から見ていくと、総部省は国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「NEDOロボット白書2014」(2014年3月)から、ロボットを「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」と定義しています。 また、日本工業規格(JIS B0134:2015)では「二つ以上の軸についてプログラムによって動作し,ある程度の自律性をもち,環境内で動作して所期の作業を実行する運動機構」と定めています。
しかし、近年のIoT社会の到来を受け、政府「ロボット新戦略」(2015年1月)では、ロボットは固有の制御系を持たなくとも「知能・制御系のみによって、社会の多様な場面で、多様なロボット機能が提供できるようになる可能性もある。そうなれば、3要素の全てを兼ね備えた機械のみをロボットと定義することでは、実態を捉えきれなくなる可能性がある」とも指摘しています。
ロボットは日常生活の中で、家事支援や、介護支援等、産業の自動化以外で使用するサービスロボットと、生産環境における人作業の代替を担う産業用ロボットの2つに大別できます。
産業用ロボットとは、日本工業規格(JIS B0134:2015)で「自動制御され,再プログラム可能で,多目的なマニピュレータ であり,3軸以上でプログラム可能で,1か所に固定して又は移動機能をもって,産業自動化の用途に用いられるロボット」と定義されています。
医療用ロボット
配膳ロボット
コミュニケーションロボット
溶接ロボット
組立ロボット
搬送ロボット
産業用ロボットの種類



産業用ロボットには以下のようなロボットがあります。
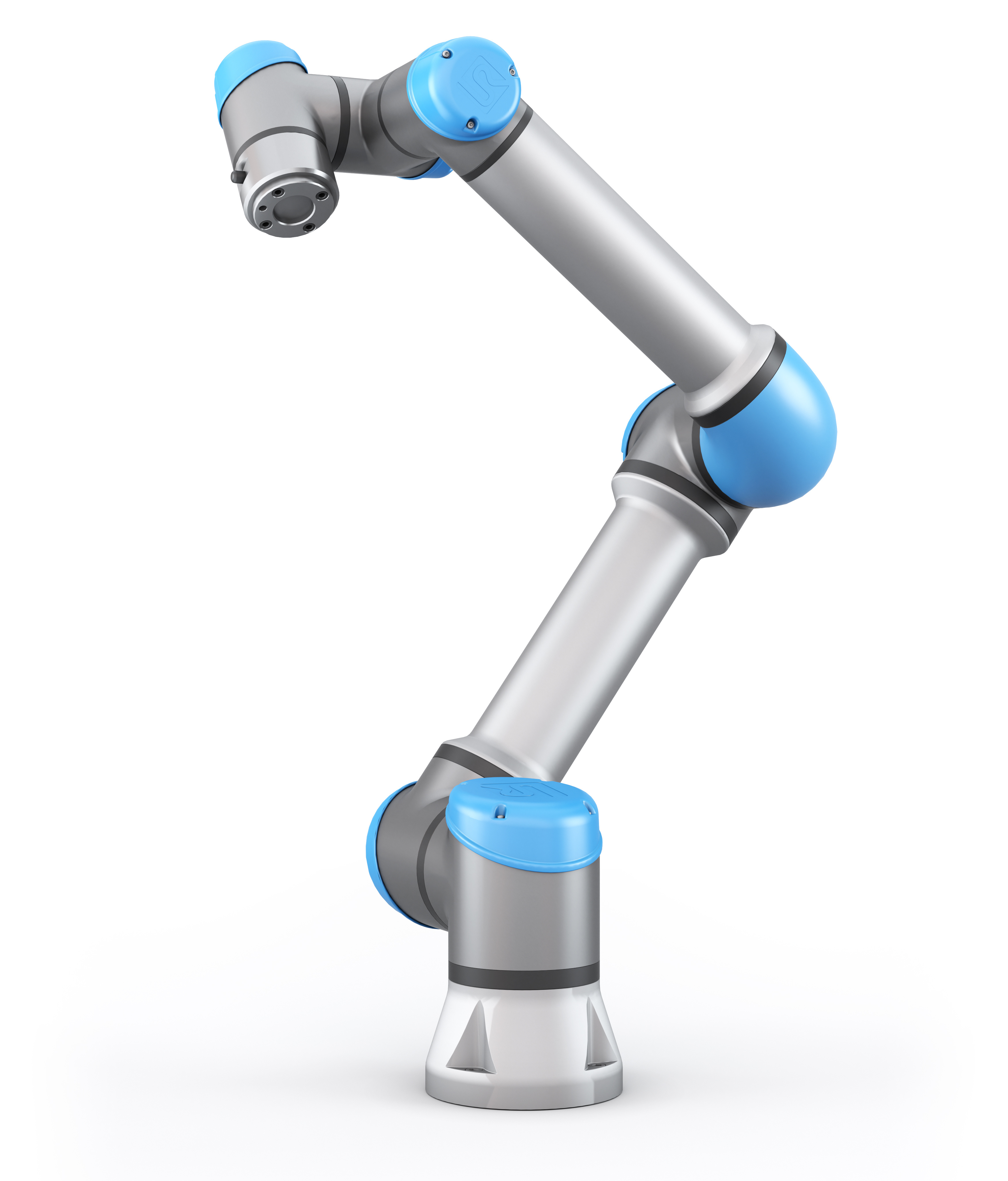
・垂直多関節ロボット
通常4つ以上、多いもので7つの軸を持つ、人間の腕のような形状をしたロボットです。
自由度が高く汎用性があり、産業ロボットの中でもっとも活躍しているロボットです。
7軸の自由度があるといわれる人間の腕に似た構造をしていることから、人が行っている作業の代替に適しています。
また、接地面積が小さく、効率的に導入できます。
・水平多関節(スカラ)ロボット
水平多関節ロボットは水平方向の回転軸2つと、垂直方向の直線軸1つからなるロボットです。さらに手首にも水平の回転軸を備えた、合計4軸のロボットが一般的です。垂直方向の可動性は低いですが、水平方向の動きには柔軟性があるため、物の高速移動などを得意とします。
・直行ロボット
単軸直動ユニットを組み合わせた2軸から4軸のシンプルなロボットです、作業は限定されますが、構造がシンプルなので、設計の自由度が高く、多関節ロボットと組み合わせて使用されるケースもあります。
・パラレルリンクロボット
パラレルメカニズム(並列なリンクを用いて、1つの先端を制御する方法)を用いたロボットです。吸着ユニットなどと同時に用いられます。高精度・高出力の制御が可能です。